
 français
français









Moteur synchrone aimant permanent
La différence principale entre un moteur synchrone à aimant permanent (PMSM) et un moteur à induction est dans le rotor. études 1 montrer que le pmsm a un Efficacité d'environ 2% 2% plus que une très efficace (IE3) moteur électrique à induction, à condition que le stator ait la même conception et le même entraînement à fréquence variable est utilisé pour contrôle. Dans ce cas, des moteurs électriques synchrones à aimants permanents par rapport aux autres moteurs électriques ont le meilleur Performance: Puissance / Volume, couple / inertie, etc.
un moteur synchrone à aimant permanent, comme tout moteur électrique rotatif, se compose d'un rotor et d'un étagère Le stator est la partie fixe Le rotor est la rotation partie.
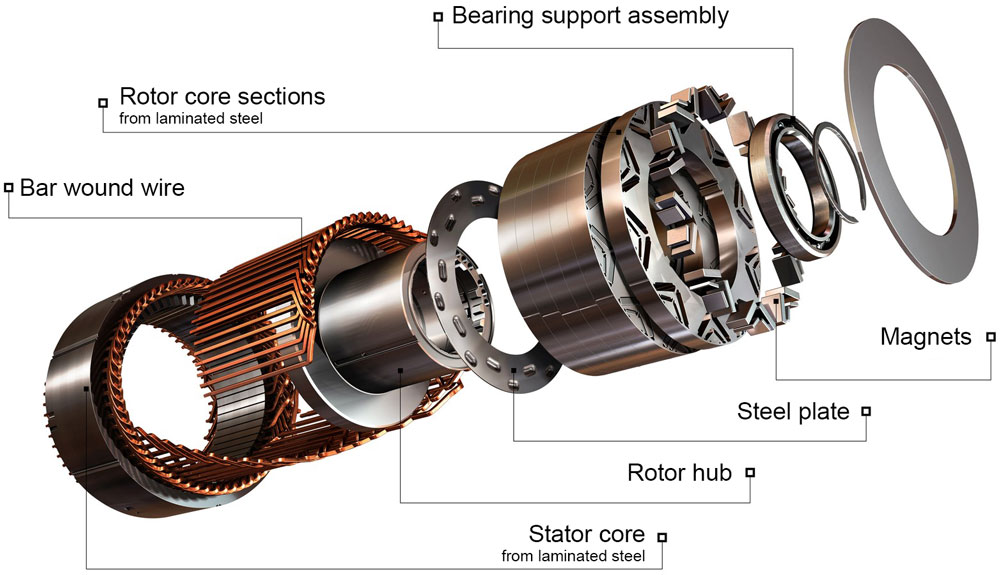
Typiquement, le rotor est situé à l'intérieur du stator du moteur électrique, il existe également des structures avec un rotor externe - Inside Out Electric Moteurs.
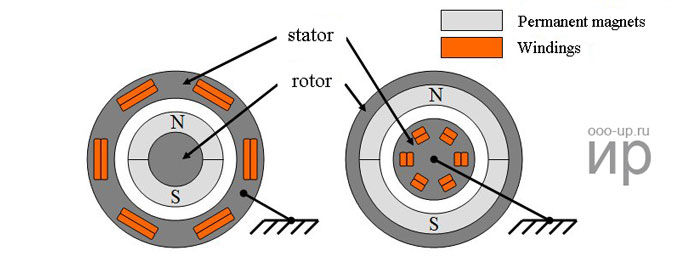
le rotorconsiste en des aimants permanents Les matériaux à forte force coercitive élevée sont utilisés comme aimants permanents.
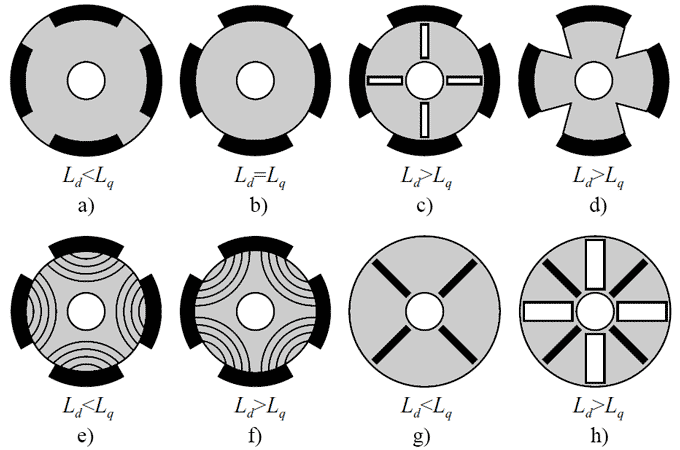
Un moteur électrique avec non saillant Le rotor de la pôle a une inductance égale directe et quadrature L ré = l q , alors que Pour un moteur électrique avec rotor de pôle saillant, l'inductance en quadrature n'est pas égale au l q ≠ l ré .
le statorse compose d'un cadre extérieur et d'un noyau avec enroulement. Le design le plus courant avec deux- et triphasé enroulement.
distribuéappeler une telle enroulement, dans laquelle le nombre de machines à sous Pole et phase Q = 2, 3, ...., k.
concentré appelé telle enroulement, dans laquelle le nombre de machines à sous Pole et phase Q = 1. Dans ce cas, les fentes sont uniformément espacées autour de la circonférence du stator. Les deux bobines formant l'enroulement peuvent être connectées à la fois en série et en parallèle. Le principal inconvénient de ces enroulements est l'impossibilité d'influencer sur la forme de la courbe EMF [2] .
La forme de la courbe EMF dans le conducteur est déterminée par la courbe de distribution de l'induction magnétique dans l'écart autour du stator tour.
On sait que l'induction magnétique dans l'écart sous le pôle saillant du rotor a une forme trapézoïdale. L'EMF induit dans le conducteur a le même forme. Si Il est nécessaire de créer un EMF sinusoïdal, puis les embouts de pôle sont donnés une telle forme que la courbe de distribution d'induction serait être proche de sinusoïdal. Ceci est facilité par les biseau biseaux des pointes de pôle du rotor [2] .
le Principe de fonctionnement d'un moteur synchrone est basé sur l'interaction du champ magnétique rotatif du stator et du champ magnétique constant du rotor. le Concept du champ magnétique rotatif du stator d'un moteur synchrone est le même que celui d'un troisième phase moteur à induction .
Le principe de fonctionnement d'un moteur synchrone est basé sur l'interaction de la champ magnétique rotatifdu stator et du champ magnétique constant de la rotor.
Le champ magnétique du rotor, interagissant avec le courant alternatif synchrone des enroulements du stator, selon le ampère Loi, crée couple, forçant le rotor à tourner ( Suite ).
Aimants permanents situés sur le rotor de la PMSM créer un champ magnétique constant champ. À une vitesse synchrone de rotation du rotor avec le champ de stator, les poteaux de rotor se verrouillent avec le champ magnétique rotatif du stator. À cet égard, le pmsm ne peut pas Démarrer elle-même quand il est connecté directement au triphasé Réseau actuel (courant actuel de la fréquence dans la grille de puissance 50Hz).
Un moteur synchrone à aimant permanent nécessite un système de contrôle, par exemple un entraînement à fréquence variableou un servo lecteur. Il existe un grand nombre de techniques de contrôle Mise en œuvre Control Systèmes. Le choix de la méthode de contrôle optimale dépend principalement de la tâche qui est placée devant le moteur électrique Les principales méthodes de contrôle d'un moteur synchrone à aimant permanent sont présentées dans la table ci-dessous.
| contrôler | avantages | désavantages | |||
|---|---|---|---|---|---|
| scalaire | Schéma de contrôle simple | Le contrôle n'est pas optimal, ne convient pas aux tâches Où La charge variable, la perte de contrôle est possible | |||
| Avec capteur de position | Réglage lisse et précis de la position de rotation du rotor et de la vitesse de rotation du moteur, une grande plage de contrôle | nécessite un capteur de position de rotor et un puissant microcontrôleur à l'intérieur du système de contrôle | |||
| Sans Capteur de position | Pas de capteur de position du rotor requis. Réglage lisse et précis de la position de rotation du rotor et de la vitesse de rotation du moteur, une grande plage de contrôle, mais moins que avec capteur de position | Sans capteur Contrôle orienté sur le terrain sur plage de vitesse complète est possible uniquement pour pmmsm avec rotor de pôle saillant, un puissant système de contrôle est requis | |||
| Contrôle direct du couple | Circuit de commande simple, bonne performance dynamique, plage de contrôle large, sans capteur de position de rotor requis | couple élevé et ondulation de courant | |||
| boucle ouverte | Schéma de contrôle simple | Le contrôle n'est pas optimal, ne convient pas aux tâches Où La charge variable, la perte de contrôle est possible | |||
| Avec capteur de position (Hall Capteurs) | Schéma de contrôle simple | capteurs de salle Obligatoire. Il y a du couple ondulations. Il est destiné au contrôle de PMSM avec dos trapézoïdal EMF, quand Contrôle PMSM Avec le dos sinusoïdal EMF, le couple moyen est inférieur par 5%. | |||
| Sans capteur | Système de contrôle plus puissant requis | ne convient pas à la basse vitesse opération. Il y a du couple ondulations. Il est destiné au contrôle de PMSM avec dos trapézoïdal EMF, quand Contrôle PMSM Avec le dos sinusoïdal EMF, le couple moyen est inférieur par 5%. | |||
À Résoudre des tâches simples est généralement utilisé de manière trapézoïdale avec capteurs de hall (pour Exemple, ordinateur fans). À résoudre des problèmes nécessitant une performance maximale du lecteur électrique, orienté sur le terrain le contrôle est généralement sélectionné.
L'une des méthodes les plus simples de contrôle d'un moteur synchrone à aimant permanent est - trapézoïdal contrôle. Le contrôle trapézoïdal est utilisé pour contrôler le pmsm avec dos trapézoïdal EMF. Dans le même temps, cette méthode vous permet également de contrôler le pmsm avec un dos sinusoïdal EMF, mais le couple moyen de l'entraînement électrique sera inférieur de 5% et les ondulations de couple seront 14% du maximum Valeur. Il y a une commande trapézoïdale sans retour et avec rétroaction par le rotor position.
le Contrôle de boucle ouverte (Sans Commentaires) n'est pas optimal et peut conduire à la libération du pmsm hors de synchronisme, c'est-à-dire une perte de contrôlabilité.
En tant que capteur de position du rotor pour triphasé Contrôle trapézoïdal, trois capteurs de hall intégrés à un moteur électrique sont couramment utilisés, ce qui permet de déterminer l'angle avec une précision de ± 30 degrés. Avec ce contrôle, le vecteur de courant du stator ne prend que six positions pour une période électrique, à la suite de laquelle il y a un couple d'ondulation à la Sortie.

Orienté sur le terrain Contrôle (FOC) vous permet de contrôler sans précision la vitesse et de contrôler de manière précise de manière précise et indépendante. coupled'un sans brosse moteur. Pour Le fonctionnement de l'algorithme de contrôle orienté champ, il est nécessaire de connaître la position du rotor de la sans balai moteur.

Depuis Les années 1970 sans capteur Méthodes de contrôle de vecteur pour sans brosse ca moteursa commencé à être développé, grâce au développement rapide de microprocesseurs. Le premier sans capteur Les procédés d'estimation de l'angle étaient basés sur la propriété du moteur électrique pour générer des EMF pendant rotation. L'EMF du moteur du moteur contient des informations sur la position du rotor, par conséquent en calculant la valeur de l'EMF arrière dans le système de coordonnées stationnaire, vous pouvez calculer la position du rotor. Mais quand Le rotor ne fait pas rotation, l'EMF arrière est absent et à basse vitesse, l'EMF arrière a une petite amplitude, ce qui est difficile à distinguer du bruit, ce procédé ne convient donc pas à la détermination de la position du rotor de moteur à basse vitesse. .

À l'heure actuelle, SensorSless orienté sur le terrain Contrôle de PMSM Dans la plage de vitesse complète n'est possible que pour les moteurs avec pôle saillant Rotor.
Pour Demandes de renseignements sur nos produits ou Pricelist, laissez-nous s'il vous plaît et nous serons en contact dans les 24 heures.





 Appeler au :
Appeler au :
Téléphoner : +8613860661520
 Envoyez-nous un email :
Envoyez-nous un email :
E-mail : ivy@tech-zy.com
 Adresse :
Adresse :
Floor 16 Building#3, No.136. Kuiqi Road, Mawei District, Fuzhou City, Fujian Province, China
© droits dauteur: 2026 Fujian ZY Electric & Machinery Technology Co.,Ltd Tous les droits sont réservés.

IPv6 réseau pris en charge






